The differential is a critical component in automotive drivetrains, especially in vehicles equipped with driven axles. It plays a pivotal role in ensuring efficient torque distribution while allowing for necessary wheel speed differentiation, especially during turning maneuvers. This article presents a technical exploration of the differential’s functional principles, mechanical operation, and its role in various drivetrain configurations.
1. Fundamental Purpose: Torque Distribution with Rotational Speed Compensation
In a typical driving scenario, particularly during cornering, the left and right drive wheels follow paths of unequal radius, necessitating different rotational speeds. The differential allows this relative motion between wheels while maintaining continuous torque delivery from the engine. Without this mechanism, the drivetrain would experience excessive internal stress, leading to compromised handling, increased tire wear, and potential mechanical failure.
2. Mechanical Operation

At its core, an open differential consists of:
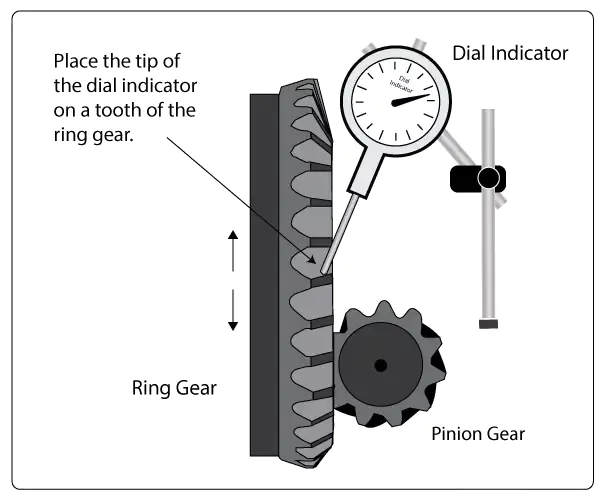
- Input Pinion Gear: Driven by the driveshaft.
- Ring Gear (Crown Wheel): Mounted on the differential carrier, transfers power to side gears.
- Spider Gears (Planetary Gears): Mounted on a cross-shaft inside the carrier.
- Side Gears: Connected to the axle shafts.
When both wheels have equal traction and resistance, the spider gears do not rotate on their axis and the ring gear drives both axles equally. However, when a speed difference arises (e.g., in a corner), the spider gears rotate, allowing each axle to turn at different speeds while still transferring torque.
3. Differential Behavior in Varying Conditions
- Straight-line motion: Spider gears remain stationary; power is evenly distributed.
- Cornering: Spider gears rotate, allowing outer wheel to spin faster than the inner.
- Low traction (one wheel slips): In an open differential, torque follows the path of least resistance, often rendering the system ineffective in off-road or slippery conditions.
4. Differential Types and Their Functional Enhancements
- Limited-Slip Differential (LSD)
Limits the speed difference between wheels using clutch packs, cone clutches, or worm gears (e.g., Torsen). Ensures that a portion of torque is still delivered to the wheel with traction. - Locking Differential
Mechanically locks both wheels together on demand, often used in off-road or heavy-duty vehicles. Can be manual, pneumatic, or electronically actuated. - Torque Vectoring Differential
Uses electronic control and multiple clutch packs to actively distribute torque based on driving conditions, enhancing handling and stability.
5. Integration in Drivetrain Layouts
- Front-Wheel Drive (FWD): Uses a transaxle integrating transmission and differential.
- Rear-Wheel Drive (RWD): Differential is located in a rear axle housing.
- All-Wheel Drive (AWD): Utilizes a center differential and front/rear differentials to manage longitudinal and lateral torque split.
6. Engineering Considerations
When designing a differential system, engineers must consider:
- Gear ratios and load distribution
- Thermal management under prolonged use
- Material fatigue and wear characteristics
- Compatibility with traction control and electronic stability systems
Finite element analysis (FEA) and computational fluid dynamics (CFD) are often used in modern design to optimize strength, cooling, and efficiency.
Conclusion
The differential is a cornerstone of automotive dynamics, enabling the seemingly simple act of turning while delivering power efficiently. As vehicle demands grow—ranging from high-performance sports cars to rugged off-roaders—differential technology continues to evolve, incorporating mechanical, hydraulic, and electronic innovations to optimize traction, safety, and drivability.